成为VIP
成为VIP

统一声明:
1.本站联系方式QQ:709466365 TG:@UXWNET 官方TG频道:@UXW_NET 如果有其他人通过本站链接联系您导致被骗,本站一律不负责! 2.需要付费搭建请联系站长QQ:709466365 TG:@UXWNET 3.免实名域名注册购买- 游侠云域名 4.免实名国外服务器购买- 游侠云服务核心要点:塔夫茨大学最新研究表明,在结构化长周期操作任务中,神经符号方法以 95% 的成功率碾压 VLA 模型的 34%,能耗更是降低了近 100 倍。这一发现为具身智能的发展路线提供了重要参考。
背景:VLA 模型狂热下的冷思考
过去两年,具身智能领域呈现出一个清晰趋势:将视觉、语言和动作统一整合到单一大型模型中。这类被称为 Vision-Language-Action(VLA)的模型,能够看、能听懂指令,还能直接输出动作指令,被视为通往通用机器人的关键路径。
然而,在机器人学界狂热追逐更大、更强的 VLA 模型时,一个根本性问题却被有意无意地忽略了:这些动辄数十亿参数、需要数天微调、运行时还要消耗大量 GPU 资源的庞然大物,真的适合那些具有明确规则和约束的结构化任务吗?
实验设计:汉诺塔上的公平对决
塔夫茨大学(Tufts University)研究团队给出了一个响亮的否定答案。他们设计了一场精心控制的「汉诺塔」操纵任务对比实验:
- 选手 A:当前最先进的开源 VLA 模型 π0
- 选手 B:结合 PDDL 符号规划与扩散策略的神经符号架构(NSM)
汉诺塔任务具备三个关键特征:明确的规则约束、长周期规划需求、强结构依赖性,是检验「推理能力」的理想场景。
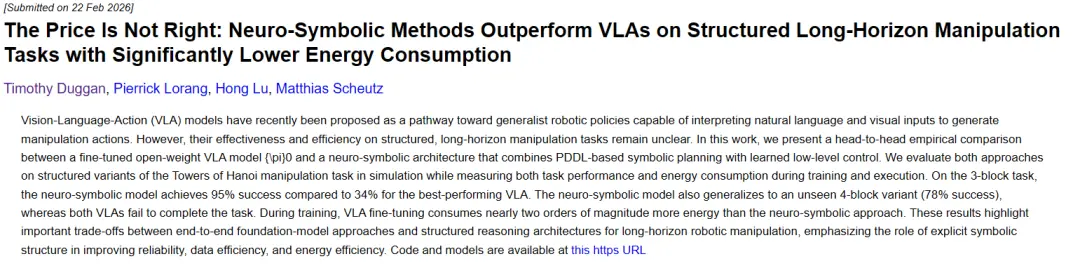
图 1:VLA 模型与 NSM 实验比较概述。
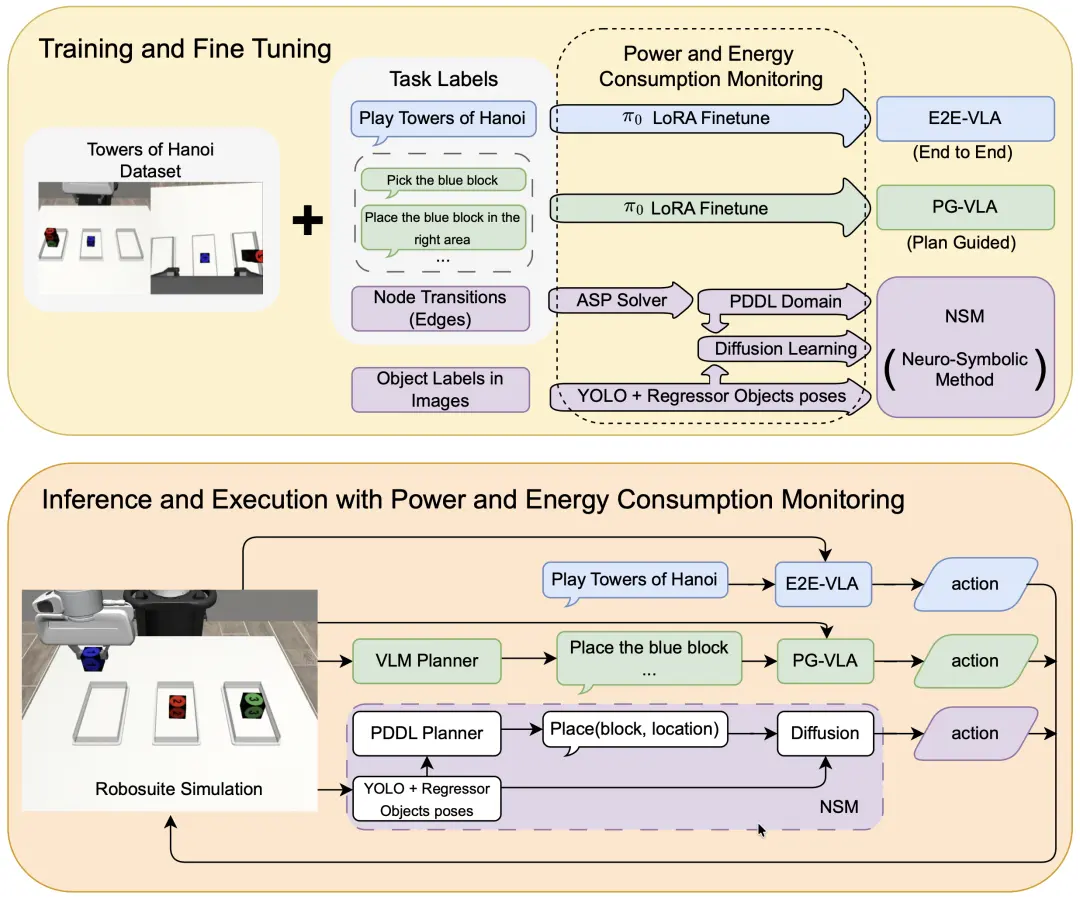
图 2:数据集中的示例观测数据。
结果:碾压性的差距
三块汉诺塔任务(训练范围内):
- 神经符号模型(NSM)成功率:95%
- 最优 VLA 模型成功率:34%
- 差距接近3 倍
四块汉诺塔任务(未见过的复杂度):
- 神经符号模型成功率:78%(展现结构泛化能力)
- 所有 VLA 模型:完全失败(0% 成功率)
更令人震惊的是能耗对比:VLA 微调消耗的能量是 NSM 训练的近100 倍,即使仅看推理阶段,能耗差距也接近 10 倍。
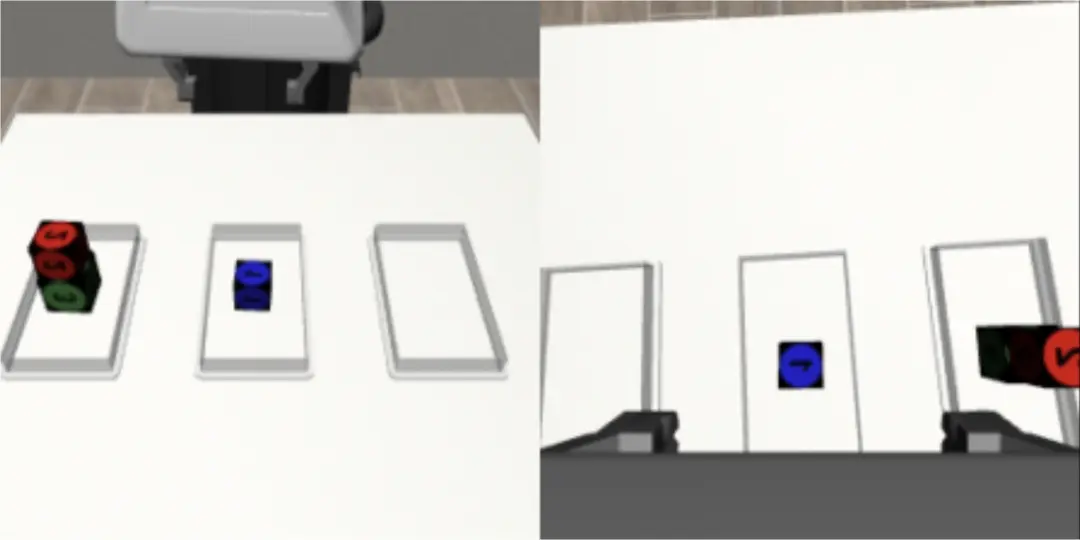
图 3:结果对比图表。
为何 VLA 会失败?
研究发现,VLA 的失败主要原因并非规划错误,而是低级执行上的偏差——反复抓取失败、放置位置不准。训练数据中的随机扰动(如块位置偏移 1cm)本意是增强稳健性,反而让模型难以锁定精确目标。
相比之下,NSM 采用「分层」设计:高层用 PDDL 符号规划器基于从少量演示中提取的抽象规则生成符号化计划;低层用扩散策略将计划转化为连续控制动作。这种设计将「推理」与「执行」解耦,规则清晰、可解释性强。
数据效率的鲜明对比
在训练数据方面:
- VLA:消耗了 300 个完整汉诺塔轨迹
- NSM:仅使用 50 个简单的「堆叠」演示(从未见过完整的汉诺塔求解过程)
这意味着 NSM 不仅性能更优,而且数据效率高出 6 倍。

表 1:训练硬件指标对比。
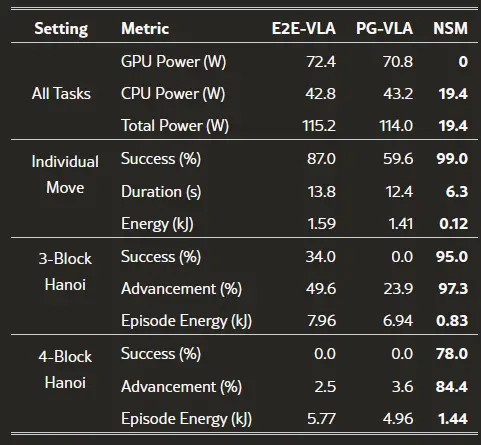
表 2:实验的功耗、能耗及任务表现。
个人观点与点评
这项研究的意义远超实验本身,它提出了几个值得深思的问题:
1. 「通用」不等于「合算」
当前 AI 领域存在一种「大模型万能论」的倾向,认为只要模型足够大、数据足够多,就能解决所有问题。但这项研究表明,在特定场景下,小而美的专用架构可能比通用大模型更有效、更经济。
2. 神经符号融合可能是正确方向
纯神经网络方法和纯符号方法各有优劣。神经符号方法结合了神经网络的学习能力和符号系统的可解释性、规则遵循能力,在结构化任务中展现出独特优势。这可能是未来 AI 发展的重要方向之一。
3. 能源效率不容忽视
在气候变化和能源危机的大背景下,AI 系统的能源消耗问题日益突出。如果 VLA 模型的能耗是神经符号方法的 100 倍,那么在大规模部署时,这一差距将变得不可忽视。
4. 应用场景决定技术路线
VLA 模型可能更适合开放环境下的短程、灵活操作(如家庭服务机器人);而工业装配、实验室自动化、规则明确的物流任务,神经符号架构可能是更务实的选择。
研究出处
该研究以《The Price Is Not Right: Neuro-Symbolic Methods Outperform VLAs on Structured Long-Horizon Manipulation Tasks with Significantly Lower Energy Consumption》为题,将于 2026 年 5 月在维也纳国际机器人与自动化会议(ICRA)上发表。
论文链接:https://arxiv.org/abs/2602.19260
(本文内容据机器之心报道整理,原文链接:https://www.jiqizhixin.com/articles/50d5041d-8517-4bee-a037-bd9e84ec86c8)
2. 分享目的仅供大家学习和交流,您必须在下载后24小时内删除!
3. 不得使用于非法商业用途,不得违反国家法律。否则后果自负!
4. 本站提供的源码、模板、插件等等其他资源,都不包含技术服务请大家谅解!
5. 如有链接无法下载、失效或广告,请联系管理员处理!
6. 本站资源售价只是赞助,收取费用仅维持本站的日常运营所需!
7. 如遇到加密压缩包,请使用WINRAR解压,如遇到无法解压的请联系管理员!
8. 精力有限,不少源码未能详细测试(解密),不能分辨部分源码是病毒还是误报,所以没有进行任何修改,大家使用前请进行甄别!
站长QQ:709466365 站长邮箱:709466365@qq.com